Componentes de um Robô: Entenda as Peças que Completam um Robô
Introdução
Os robôs são sistemas complexos compostos por diferentes componentes que trabalham em conjunto para realizar tarefas específicas. Esses componentes variam dependendo do tipo de robô, mas, em geral, todos os robôs compartilham alguns elementos fundamentais, como sensores, atuadores, controladores, e sistemas de alimentação. Neste artigo, vamos explorar os principais componentes de um robô, entender suas funções e a importância de cada um no funcionamento eficiente do robô.
1. Sensores
Os sensores são fundamentais para que o robô perceba o ambiente ao seu redor e tome decisões com base nas informações que recebe. Assim como os sentidos humanos, os sensores nos robôs permitem que eles detectem variações no ambiente, como a proximidade de objetos, mudanças de temperatura, ou a presença de luz.
Os tipos de sensores mais comuns em robôs incluem:
- Sensores de Proximidade: Utilizados para medir a distância entre o robô e objetos próximos.
- Câmeras e Sensores Visuais: Permitem que o robô “veja” e processe imagens, como no caso de câmeras para navegação e reconhecimento de objetos.
- Sensores de Temperatura: Usados para medir a temperatura em torno do robô ou em componentes específicos, como motores ou circuitos.
- Sensores de Toque: Detectam o contato físico com outros objetos, podendo ser usados para evitar colisões ou identificar a manipulação de um objeto.
Esses sensores fornecem as informações necessárias para que o robô reaja ao seu ambiente de maneira autônoma e precisa.
2. Atuadores
Os atuadores são os componentes responsáveis por executar as ações físicas do robô. Eles recebem comandos do controlador e transformam energia em movimento ou força. Dependendo da função do robô, os atuadores podem ser responsáveis por mover suas partes, como braços, pernas ou rodas, ou realizar operações específicas, como soldagem ou pintura.
Existem diferentes tipos de atuadores:
- Motores Elétricos: Comumente usados para movimentar as rodas ou os braços do robô, convertendo a energia elétrica em movimento rotacional.
- Atuadores Pneumáticos: Usados em sistemas que requerem força ou movimento gerados por pressão de ar, como em alguns braços robóticos.
- Atuadores Hidráulicos: Utilizados quando é necessário gerar força muito alta, geralmente em robôs industriais pesados.
Esses atuadores desempenham um papel vital na execução das tarefas do robô, possibilitando movimento, manipulação de objetos e realização de funções específicas.
3. Controlador (Cérebro do Robô)
O controlador é o cérebro do robô. Ele processa as informações recebidas pelos sensores e emite comandos para os atuadores, determinando como o robô deve se comportar. O controlador é geralmente composto por um microcontrolador ou um computador embarcado, que executa um conjunto de programas e algoritmos que permitem que o robô realize suas tarefas de forma autônoma.
O controlador pode ser programado para realizar tarefas específicas, como navegação, manipulação de objetos ou até mesmo interações com seres humanos. Em robôs mais avançados, o controlador também pode incorporar inteligência artificial, permitindo que o robô aprenda com suas experiências e melhore seu desempenho ao longo do tempo.
4. Sistema de Alimentação
O sistema de alimentação fornece a energia necessária para que todos os componentes do robô funcionem. Dependendo do tipo de robô, o sistema de alimentação pode ser composto por baterias recarregáveis, fontes de alimentação externas ou até sistemas de energia autossustentáveis, como células solares.
Existem diferentes tipos de fontes de alimentação, incluindo:
- Baterias Recarregáveis: São as fontes de energia mais comuns, usadas em robôs móveis e portáteis, permitindo autonomia para operar por um período determinado.
- Fontes de Alimentação Externas: Alguns robôs industriais são conectados a redes de energia externas para fornecer energia contínua durante longos períodos de operação.
- Células Solares: Alguns robôs autônomos ou exploratórios usam células solares para coletar energia do ambiente, permitindo uma operação mais independente e sustentável.
A escolha do sistema de alimentação depende das necessidades específicas do robô, como o tempo de operação e a autonomia necessária para suas funções.
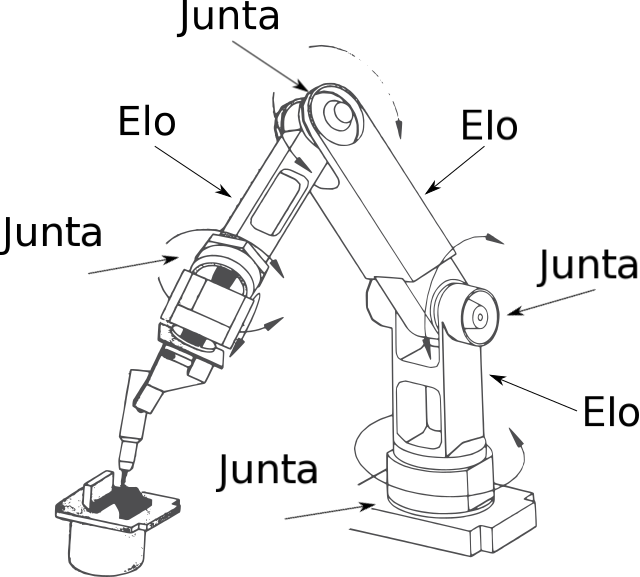
5. Estrutura Mecânica
A estrutura mecânica de um robô é responsável por dar forma e suporte à sua construção. Ela inclui os braços, pernas, rodas, chassis e qualquer outra parte física que permita ao robô interagir com o ambiente ou realizar suas tarefas. A estrutura também deve ser resistente e leve, a fim de suportar os componentes eletrônicos e permitir uma operação eficiente.
A estrutura pode variar dependendo do tipo de robô, podendo ser projetada para tarefas específicas, como manipulação de objetos, locomoção em terrenos irregulares ou interação com seres humanos.
Conclusão
Os componentes de um robô são essenciais para seu funcionamento eficaz. Cada parte do robô, desde os sensores até os atuadores e o controlador, desempenha um papel crucial em permitir que o robô execute suas funções de maneira autônoma e eficiente. Com o avanço contínuo das tecnologias de robótica, espera-se que os componentes se tornem ainda mais sofisticados, permitindo robôs mais inteligentes, ágeis e versáteis em uma ampla variedade de aplicações, desde a indústria até o cuidado com a saúde e a exploração espacial.